História robotiky 2 Svet - Od roku 1942 (v rokoch) :)
Autor: Prof. Ing. Peter Hubinský, PhD., Doplnené 27. 07. 2024
Vytvorené: 12. 06. 2016 Tlačiť
Roku 1942
- Isaac Asimov (1920-1992) publikoval poviedku Runaroud, v ktorej prvýkrát formuloval tri robotické zákony[9],
- sci-fi autor Robert Anson Heinlen (1907-1988) v poviedke Waldo rozvinul myšlienku konštrukcie teleoperátora,
- nemecká armáda zaradila do výzbroje diaľkovo ovládané minitanky Goliath.
Roku 1944 - boli pri bombardovaní Londýna prvýkrát bojovo nasadené nemecké samonavádzacie rakety V-1.
Roku 1948 - Norbert Wienner (1894-1964) publikoval prácu Kybernetika alebo riadenie a komunikácia v živých organizmoch a strojoch.
Roku 1949 - Dr. Grey Walter skonštruoval robotov - korytnačky Elmer a Elsie vyhľadávajúce svetlo.
 |
 |
Výroba Elsie |
Cesta Elsie |
Roku 1950
- Alan Mathison Turing (1912-1954) publikoval článok Počítacie stroje a inteligencia[10] a vytvoril test inteligencie stroja. Do histórie sa zapísal pod názvom Turingov test,
- Claude Elwood Shannon (1916-2001) skonštruoval pre demonštráciu učiacich sa algoritmov elektrickú myš Theseus, ktorá hľadala východ z bludiska,
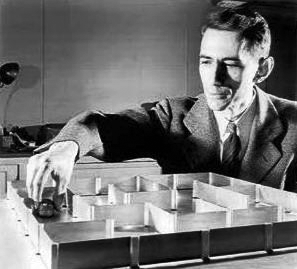 |
Theseus v bludisku |
- Ray Bradbury (1920) v poviedke There Will Come Soft Rains situovanej do roku 2026, ktorá vyšla v zbierke Marťanská kronika, popísal robotizovaný dom.
Roku 1951
- Japonec Osamu Tezuka publikoval prvý diel kresleného seriálu o chlapcovi-robotovi Tetsuwan Atom, ktorý sa stal neskôr známy ako Astro Boy,
- Ray Geortz z Argonne National Laboratories skonštruoval diaľkovo ovládanú ruku pre manipuláciu s rádioaktívnym materiálom,
- študenti univerzity v Bristole prezentovali robota, cyklistu Dynamo Joe.
 |
Dynamo Joe |
Roku 1952
- John T. Parsons a Frank L. Stulen v spolupráci s MIT vyvinuli prvý NC[11] obrábací stroj, frézu Cincinnati Hydrotel,
- Američan R. A. Wallace skonštruoval kybernetickú myš na hľadanie cesty z bludiska,
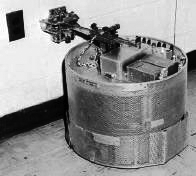
- Edmund C. Berkely skonštruoval mobilného robota Squee, elektronickú veveričku naháňajúca oriešok - tenisovú loptičku.
Roku 1953
- Američan Harvey Chapman skonštruoval diaľkovo ovládaný „robot“ GARCO,
- podmorský fotograf Dimitri Rebikoff skonštruoval diaľkovo ovládanú platformu pre potápačskú kameru,
- americká firma Barret Vehicle Systems uviedla do praxe prvý indukčne vedený automatický vozík.
Roku 1954
- britský vynálezca Cyril W. Kenward podal prvý patent z oblasti robotiky,
- svoj ďalší, mimoriadne dôležitý patent z oblasti robotiky, podal aj Američan George Devol pôsobiaci v štáte Conecticut, v meste West Port. Devol, mimoriadne nadaný samouk bez vysokoškolského vzdelania, ktorý sa všeobecne považuje za starého otca robotiky, mal v tom čase už vyše 40 patentov na konštrukcie svojich hydraulických robotov a ich riadiacich systémov. Jeho patentovaný robot, prvý priemyselný robot na svete, mal masívnu konštrukciu a využíval hydraulické lineárne a rotačné motory. Ovládanie týchto hydraulických servomotorov bolo elektrické. Prvý, kto ocenil Devolove práce, bol absolvent Columbijskej univerzity Joseph F. Engelberger,
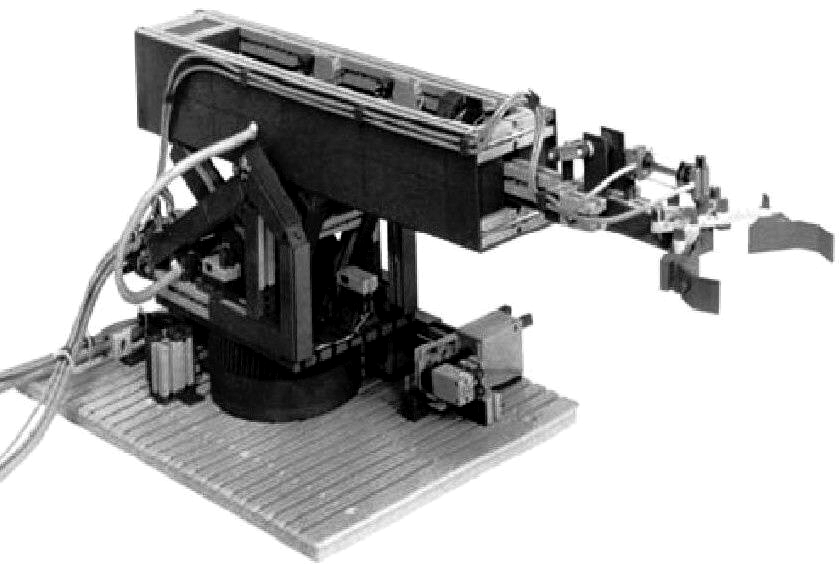 |
Prvý priemyselný robot sveta Georgea Devola z roku 1954 |
- Jerome Lemelson podal prihlášku patentu na automatizovaný skladový systém.
Roku 1955 - japonský avantgardný výtvarník Akira Kanayama vystavil svoje obrazy kreslené prerobenými detskými autíčkami na diaľkové ovládanie.
Roku 1956
- Joseph Engelberger a George Devol založili prvú robotickú firmu Unimation,
- bola vytvorená filmová postava robota Robby, prvá pozitívna robotická postava vo filme,
- Nicolas Schöffer prezentoval svoju prvú prácu, interaktívnu sochu CYSP-1[12].
Roku 1957 - Dániel Muszka pod vedením profesora Kalmár Lászlóa skonštruoval mobilného robota Katicabogár.
 |
 |
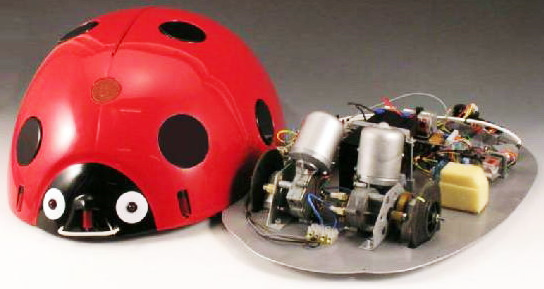 |
Ladybird Dániela Muszu |
||
Roku 1959
- výsledkom spolupráce Josepha Engelbergera a Georgea Devola sa stal prvý univerzálnejší priemyselný robot na svete nazvaný UNIMATE. Prvý priemyselný robot bol nasadený v závode General Motors v Trentone v štáte New Jersey a jeho úlohou bolo vyberať horúce kovové odliatky zo stroja a ukladať ich na určené miesto,
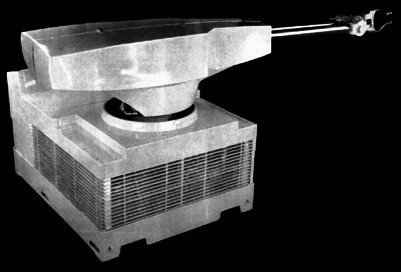 |
Prvý univerzálnejší priemyselný robot na svete UNIMATE |
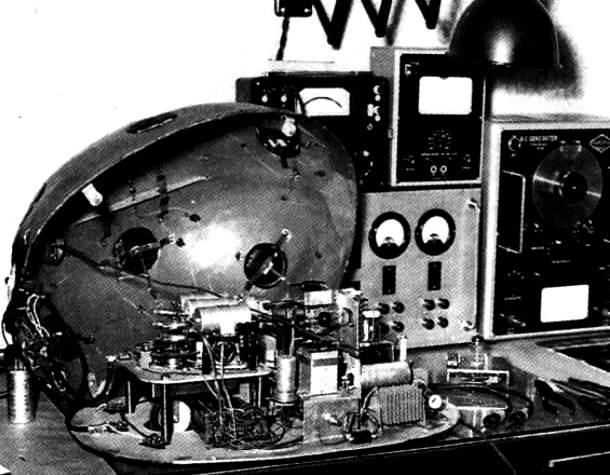
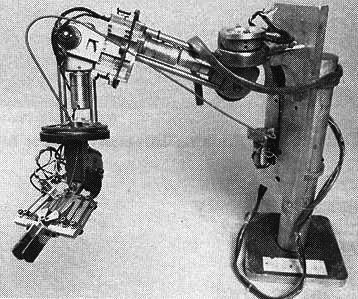
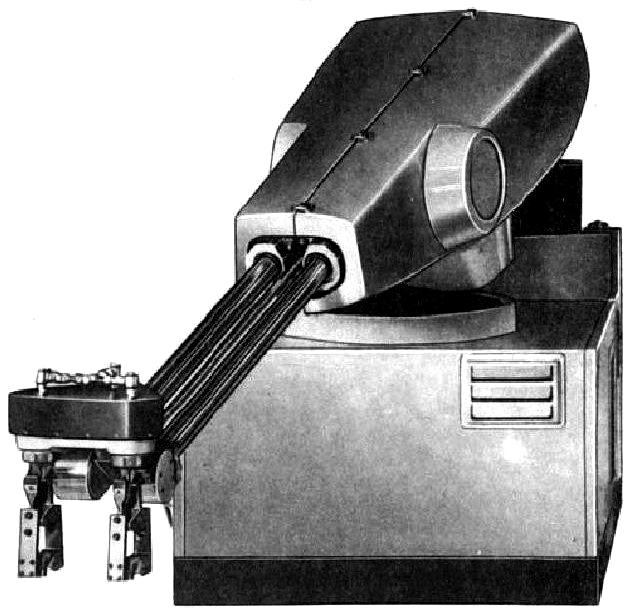
- John W. Clark pod hlavičkou spoločnosti Hughes Aircraft Co. dokončil diaľkovo ovládaný dvojruký manipulátor MOBOT určený na manipuláciu s rádioaktívnymi vzorkami.
 |
Mobot |
Roku 1961
- vo výrobnej linke spoločnosti General Motors[13] boli pri striekaní karosérií automobilov nasadené prvé priemyselné roboty (robotické ramená) UNIMATE 1900. Pri prvotnom striekaní operátor držal koncový bod robota[14] so striekacou pištoľou rukou a v tomto, tzv. režime učenia[15], dostával robot prostredníctvom svojich snímačov informácie o rýchlosti a polohe svojich ramien a striekacej pištole. Informácie zo snímačov sa v číslicovej podobe zaznamenávali na magnetofónovú pásku, čím vznikol riadiaci program robota. Pri ďalšom striekaní sa činnosť robota opakovala podľa uvedeného programu. Táto robotizovaná technológia udivila v tom čase celý priemyselný svet a bola neskôr rozšírená do všetkých, priemyselne vyspelých štátov,
 |
 |
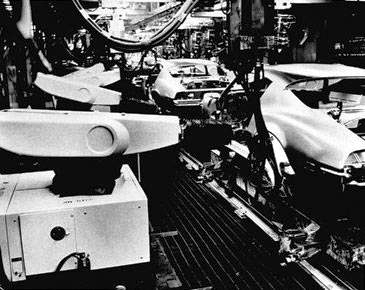 |
Nasadenie robotov Unimate v spoločnosti General Motors |
||
- Henrich Ernst z MIT skonštruoval v rámci dizertačnej práce počítačom ovládanú mechanickú ruku s chápadlom MH-1.
Roku 1962 - spoločnosť AMF[16] ponúkala na predaj robot Versatran.
 |
 |
Versatran |
Rancho-Arm |
Roku 1963
- v Los Amigos Spital v Downey[17] bolo skonštruované počítačom riadené robotické rameno Rancho-Arm so 6 stupňami voľnosti,
- BBC začala vysielať televízny sci-fi seriál Doctor Who, v ktorom vystupoval robotický pes K-9 a ďalšie kybernetické bytosti Cybermani a Dalekovia,
- česká televízia uviedla prvý diel seriálu humorných príbehov O Robotovi Emilovi určeného detským divákom.
Roku 1964
- americká armáda vo Vietname použila na výzvedné účely upravené letecké terče Firebec AQM-34 diaľkovo ovládané z lietadla C-130,
- boli vyrobené mobilné roboty „Hopkins Beast“ schopné nájsť zástrčku a nabiť sa.
 |
Hopkins Beast |
Roku 1965
- Victor Scheinman a Larry Liefer zo Standfordskej univerzity skonštruovali počítačom riadené a stlačeným vzduchom poháňané rameno The ORM,
- vo firme General Electric začali pracovať na projekte prvého exoskeletonu, neskôr predstaveného pod názvom Hardiman.
 |
Hardiman |
V rokoch 1965-1970 - sa v Československu realizovalo celkovo 566 automatizovaných technologických pracovísk, v ktorých bolo nasadených celkovo 1204 systémov priemyselných robotov a manipulátorov domácej a zahraničnej produkcie.
Roku 1966
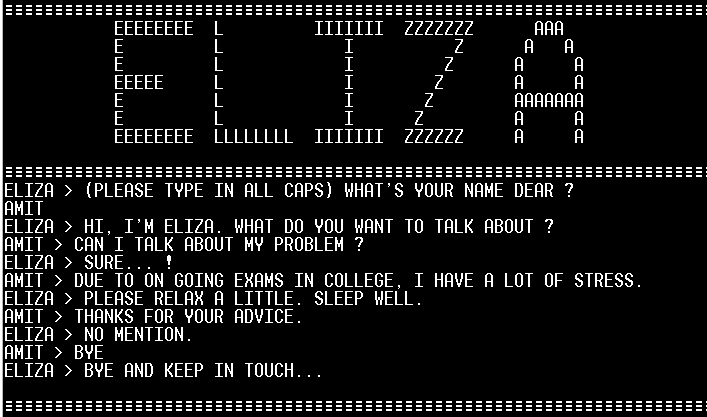
- Joseph Weizenbaum (1923-2008) vytvoril program Eliza, ktorý mnohých ľudí presvedčil, že sa rozprávajú s iným človekom pri inom počítači, a nie so samotným počítačom,
 |
- nórska firma Trallfa vyvinula striekací robot,
- na MIT robili pokusy so skladaním kociek na báze silovej spätnej väzby,
- podmorský diaľkovo ovládaný robot CURV-I vyťahoval z morského dna neďaleko španielskeho pobrežia vodíkovú bombu, ktorá vypadla pri kolízii bombardéru B-52.
Roku 1967
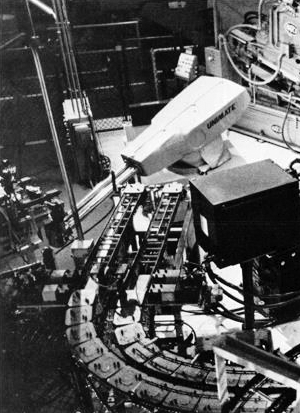
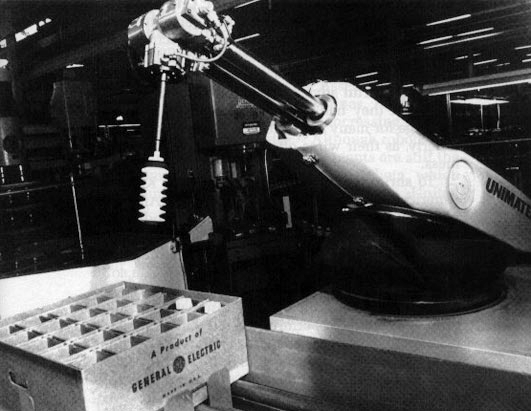
- v závode spoločnosti GM v meste Lordstone, v štáte Ohio prebiehali pokusy s využitím robotov na zváračskej linke karosérií vozidiel Chevrolette Vega. Úspešný výsledok pokusov s dvoma robotmi mal za následok nasadenie celkove 28 robotov UNIMATE so zváracími kliešťami na odporové bodové zváranie v rokoch 1969-1970. Išlo o jednu z prvých veľkých aplikácií robotov na svete,
- počas svojho turné v Japonsku absolvoval veľké množstvo prednášok v inštitúciách a korporáciách Joseph Engelberger. Pritom vzbudil až tak nesmiernu pozornosť, predovšetkým japonského manažmentu, že už v tom roku začali Japonci vyrábať v licencii americké typy robotov UNIMATE. Toto obdobie možno označiť za začiatok tzv. japonskej robotiky, ktorej zaostávanie, v porovnaní s USA, sa v priebehu nasledujúcich niekoľko rokov vyrovnalo,
 |
 |
Pokus s využitím robota UNIMATE |
Japonský priemyselný robot Kawasaki |
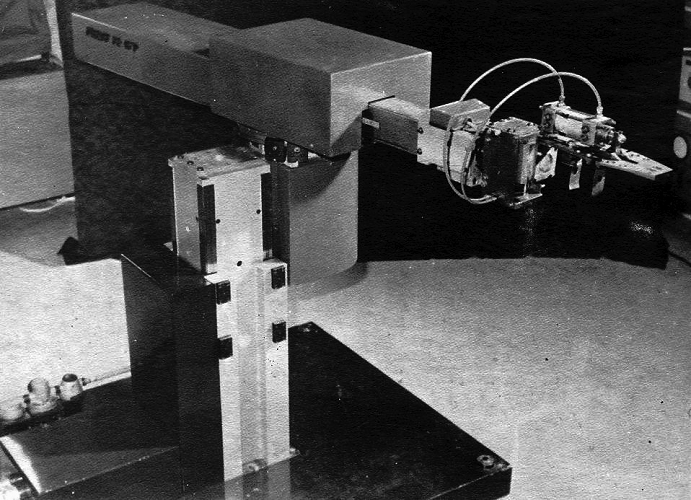
- za prvý pokus použitia priemyselného robota v Československu možno pokladať inštaláciu automatického pracoviska, pozostávajúceho z československého poloautomatického revolverového sústruhu RB 25 a priemyselného robota UNIMATE dovezeného z USA, na svetovej výstave EXPO 1967 v kanadskom Montreale. Priemyselný robot zabezpečoval podávanie a odoberanie obrobkov do sústruhu a zo sústruhu, ako aj kontrolu rozmerov obrobených súčiastok,
 |
Prvý pokus použitia priemyselného robota v Československu.
|
- Ralph Moser z firmy General Electric predviedol ručne ovládané chodiace vozidlo.
Obdobie rokov 1968-1972 - bolo obdobím veľkého rozvoja robotiky v Japonsku. Napríklad spoločnosť SHINMEIWA INDUSTRY co. Ltd vyvinula šesť typov priemyselných robotov pracujúcich v tzv. pravouhlom súradnicovom systéme. Mimoriadnu zásluhu na razantnom rozvoji japonskej robotiky zohrala organizácia MITI[18], ktorá v tom čase približne s 12 000 pracovníkmi[19] úpenlivo zhromažďovala intelektuálne a technologické informácie o rozvoji robotiky v ostatnom svete.
Roku 1968
- Marvin Minsky predstavil svoje hydraulické rameno s 12 stupňami voľnosti[20],
- Edward Ihnatowicz skonštruoval sochu reagujúcu na okoloidúcich pod názvom SAM[21].
Roku 1969
- Victor Scheinman skonštruoval prvé elektricky poháňané a počítačom riadené rameno, tzv. Stanford Arm,
- firma MOWBOT Inc. inzerovala svoju robotickú kosačku.
Začiatkom 70-tych rokov
- sa svetová robotika začala rozvíjať v plnom rozsahu. Vo všeobecnosti sa toto obdobie považuje za tretiu etapu priemyselnej revolúcie[22],
- sa zakladajúcim a priekopníckym pracoviskom rozvoja robotiky v Československu stal VÚKOV Prešov. Z vlastnej iniciatívy zabezpečoval výskum, výrobu a technologické aplikácie prvých československých priemyselných robotov a manipulátorov. Na tomto pracovisku vznikol aj prvý československý, neskôr sériovo vyrábaný, priemyselný robot PR 16-P,
- vznikla v Japonsku organizácia JIRA[23], ktorá združovala 87 rôznych inštitúcií súvisiacich s výrobou robotov, aplikáciami, vzdelávaním, medzinárodnými kongresmi a podobne.
Roku 1970
- na Stanford Research Institute bol predstavený prvý autonómny mobilný robot Shakey,
 |
Shakey |
- vo výstavnej sále Evolution firmy Philips v Eindhovene bola predvedená počítačom riadená interaktívna socha Senster z autorskej dielne Edwarda Ihnatowicza,
- na Mesiaci pracovalo sovietske prieskumné vozidlo Lunochod 1.
Roku 1971 - sa aj v Československu začala venovať sústavná pozornosť robotike.
Roku-1972---Marvin Minsky a Seymour Papert skonštruovali korytnačku Irving určenú na demoštráciu programovacieho jazyka LOGO.
Roku 1973
- boli vyrobené prvé československé roboty QJN 20 v spolupráci VUSTE[24] Praha, ktorý navrhol a zhotovil mechanické časti týchto robotov, a VÚTS[25] Brno, ktorý navrhol a zhotovil riadiace systémy týchto robotov. Celkovo boli vyrobené dva exempláre týchto robotov. Jeden pracoval v DESTA Domažlice a ďalší v Považských strojárňach,
- robot Freddy Univerzity Edinburgh pomocou vizuálneho systému identifikoval polohu dielcov a skladal drevenú hračku - auto.
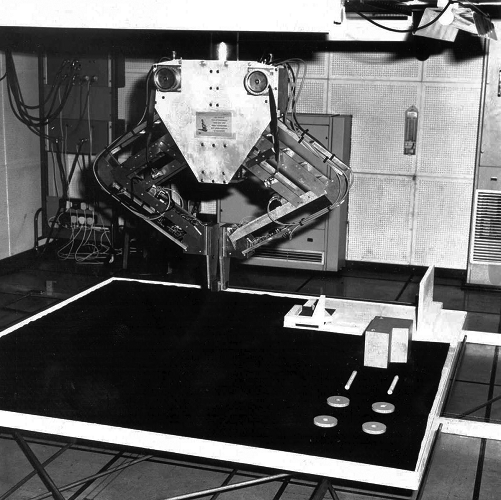 |
Freddy |
Roku 1974
- bola v USA založená inštitúcia s pôvodným názvom Robot Institut of America – RIA[26],
- sa japonská organizácia JIRA pokúsila o definíciu robota, ktorá znela: „Priemyselný robot je manipulátor s vysokým stupňom pracovnej voľnosti, ktorý vykonáva mnohostranné pohybové funkcie, ktoré sú podobné ľudským rukám.“. Už v tom čase však táto inštitúcia predpokladala, že uvedená definícia sa bude vyvíjať, pretože sa objavia roboty, ktoré sa budú pohybovými funkciami podobať pohybovým schopnostiam tvorov, ako sú napríklad hady alebo kraby,
- ASEA predstavila elektrický priemyselný robot IRB-6.
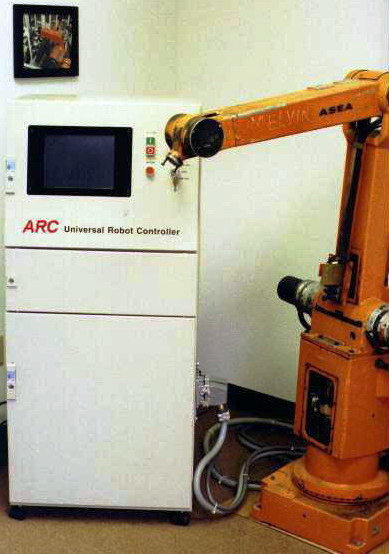 |
IRB-6 |
Roku 1975 - začal sa v Československu, výskumom, vývojom a výrobou priemyselných robotov a manipulátorov v rámci štátneho plánu rozvoja vedy a techniky, koordinovaný rozvoj robotizácie.
Roku 1976 - na Marse pristáli moduly Viking 1 a Viking 2 vybavené robotickým ramenom na odber vzoriek pôdy.
Roku 1977
- spoločnosť Quasar Industries uverejnila reklamu na fiktívneho domáceho robota Klatu za 4 000 USD,
- v kinách bola uvedená prvá časť hexalógie Star Wars Episode IV – A New Hope, režiséra George Lucasa, v ktorom vystupovalo množstvo robotických postáv.
Roku 1978
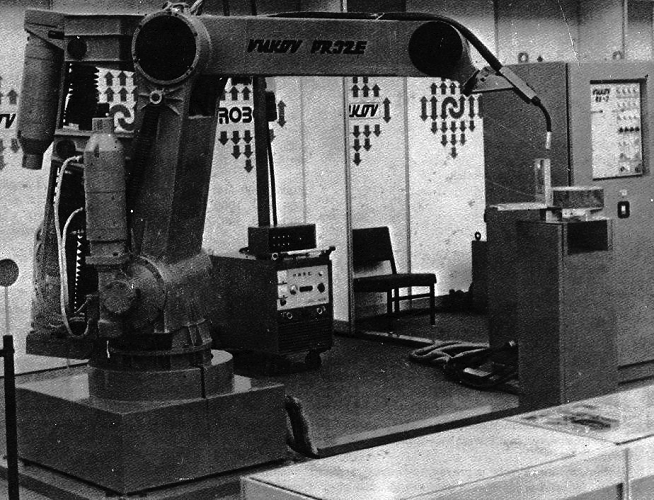
- na výstave Robot´ 78 v Brne, spoločnosť VUKOV Prešov predviedla prvý československý priemyselný robot PR 16-P,
 |
Prvý československý priemyselný robot PR 16-P |
- Susumu Tachi z Mechanical Engineering Laboratory Tokyo vyvinula robota MELDOG na vodenie nevidomých,
 |
MELDOG |
- nemecká skupina Kraftwerk vydala album Man Machine,
- Hiroshi Makino z japonskej Yamanashi University vyvinul prvý robot s kinematikou typu SCARA pre montážne úlohy,
 |
SCARA |
- kolektív Katedry automatizácie a regulácie Elektrotechnickej fakulty SVŠT Bratislava pod vedením profesora Václava Kalaša skonštruoval školský robot Kolka 025. Išlo o prvý československý robot s mikroprocesorovým riadiacim systémom. Robot bol na Medzinárodnej výstave Robot´ 82 v Brne odmenený najvyšším vyznamenaním z nevýrobnej sféry.
 |
Kolka 025, prvý čsl. robot s mikroprocesorovým
|
V rokoch 1978-1984 - vyrobilo Japonsko 16 800 priemyselných robotov, z toho 7 300 montážnych, 1 700 na elektrické oblúkové zváranie, 1 000 na odporové bodové zváranie, 1 900 na obsluhu lisov...
Roku 1979
- Stanfordský vozík Hansa Moravca a jeho kolektívu prešiel autonómne miestnosťou plnou prekážok,
- sa stal prvý smrteľný úraz pri práci s robotom. V továrni Ford Motor Company vo Flat Rock zomrel na následky zranenia robotom 25-ročný Robert Williams,
- Japonec Hajime Sorayama vytvoril svoj prvý obraz zo série sexy robotov.
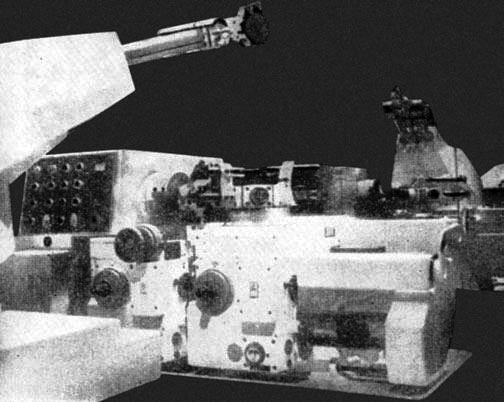
V 70-tych rokoch - sa do Československa doviezli z Anglicka dva kusy vtedy v Európe rozšíreného a najstaršieho hydraulického robota VERSATRAN 500. Jeden exemplár bol distribuovaný do AZNP Mladá Boleslav a druhý na Strojnícku fakultu VŠT Košice.
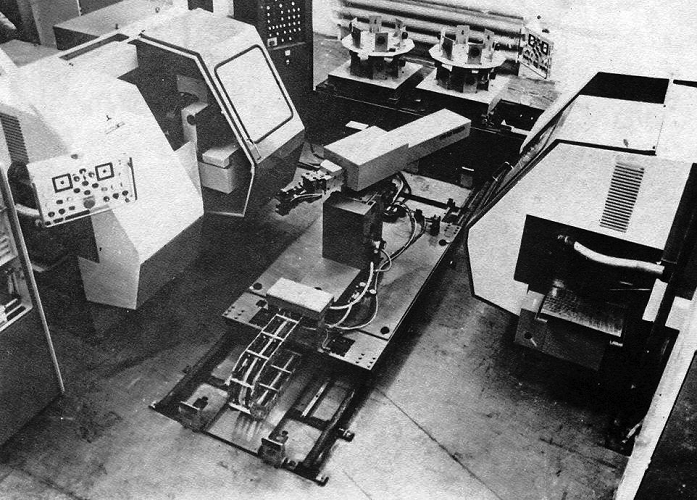 |
Automatizované pracovisko dvoch číslicovo riadených obrábacích
|
Roku 1980
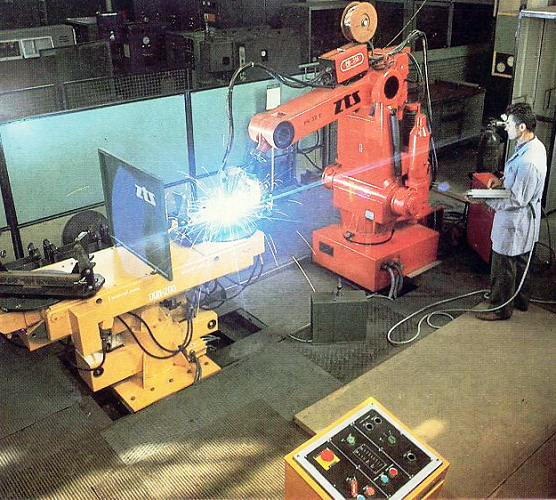
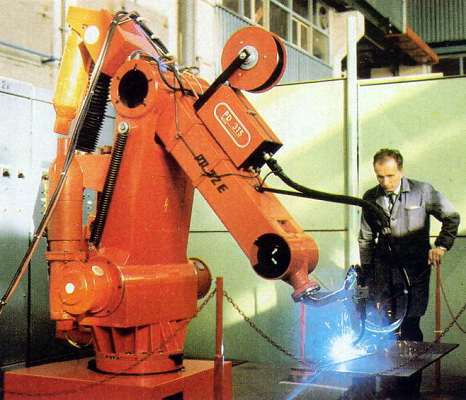
- na výstave Robot´80 v Brne, spoločnosť VUKOV Prešov predviedla priemyselný robot PR-32E,
 |
 |
PR-32E |
Telekar |
- v elektrárni V1 v Jaslovských Bohuniciach bol prvýkrát použitý robot Telekar na vizuálnu kontrolu integrity primárneho potrubia z vývoja VÚJE Trnava.
Roku 1981
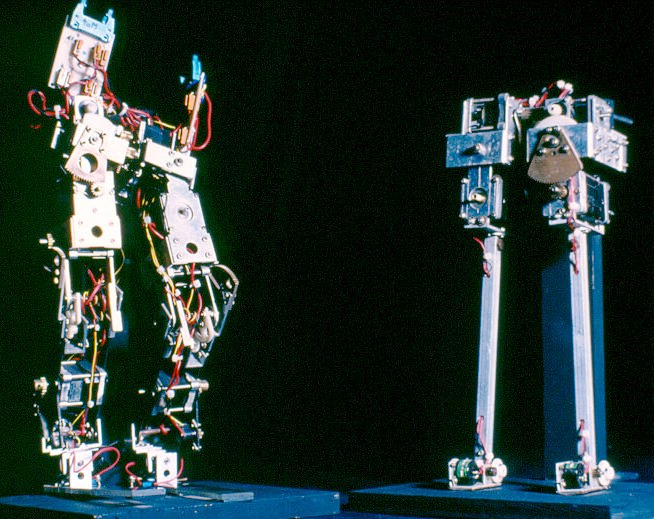
- BIPER-3 Univerzity Tokyo sa stal prvý chodiaci stroj udržiavajúci dynamickú stabilitu,
 |
 |
BIPER-4 a BIPER 3 |
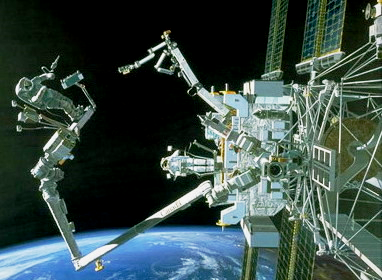
Canadarm |
- sa v rámci letu raketoplánu Columbia uskutočnila prvá skúška manipulátora Canadarm[27],
- Takeo Kanade skonštruoval prvé robotické rameno s priamym náhonom.
V rokoch 1981-1982 - sa v Československu realizovalo ďalších 443 automatizovaných technologických pracovísk s počtom 1093 priemyselných robotov a manipulátorov.
Roku 1982
- spoločnosť Heathkit uviedla na trh robot HERO 1, s procesorom Motorola 6808 a 4KB pamäte RAM,
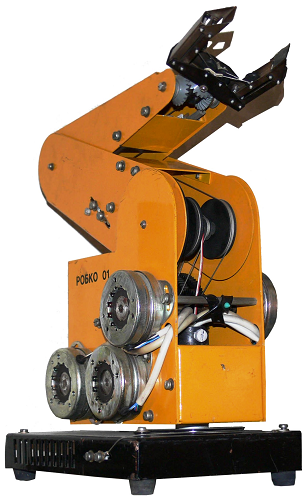
- na trhu socialistických štátov sa objavil bulharský školský robot Robko 01 riadený počítačom Pravec,
- Nolan Bushnell založil spoločnosť firmu Androbot ponúkajúcu domácich robotov BOB a TOPO.
 |
 |
 |
 |
HERO 1 |
Robko 01 |
BOB |
TOPO |
Roku 1983
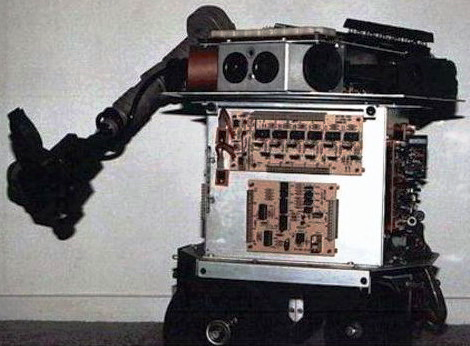
- spoločnosť Odetics prezentovala kráčajúceho robota,
- robot Remote Reconaissance Vehicle[28] vstúpil prvýkrát od nehody v roku 1979 do raketovej sály elektrárne Three Miles Island,
- v USA pracovalo približne 8 000 robotov,
- sa do Československa doviezlo 65 zahraničných priemyselných robotov.
 |
 |
Pracovisko na oblúkové zváranie s robotom PR 32-E
|
PR-32E v Bratislavských elektrotechnických závodoch |
V rokoch 1983-1985 - bolo v Československu vyrobených 86 robotov PR 16-P, 119 robotov PR 32-E, 75 robotov UM 160, 60 robotov PR 4, 74 robotov SPR10 a SPR20 na striekanie farieb, 234 manipulátorov M 63...
Roku 1984
- japonská Waseda University prezentovala Wabot 2, robota hrajúceho na klavíri,
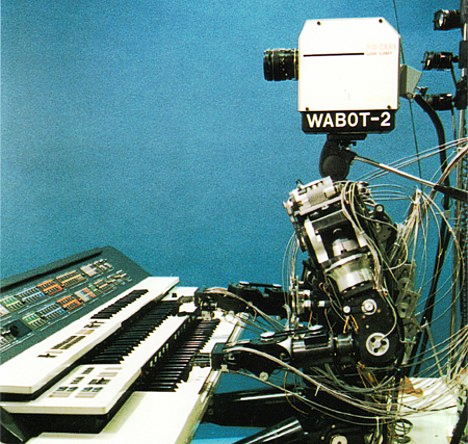 |
Wabot-2 |
- v USA pracovalo približne 13 000 robotov.
Roku 1985
- začala v Československu, v ZŤS Detva, sériová výroba robota OJ-10,
 |
Robotizované operačné modulárne pracovisko OJ-10 |
- Yik San Kwoh realizoval v Long Beach Memorial Hospital[29] prvú robotickú operáciu na človeku, biopsiu mozgu pomocou robota UNIMATE PUMA 560,
 |
 |
UNIMATE PUMA 560 |
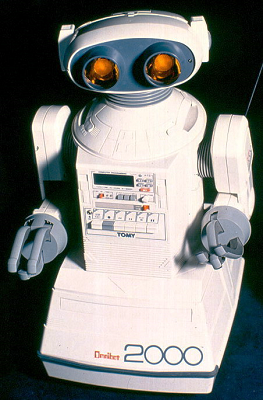
Omnibot 2000 |
- japonská firma Tomy Kyogo Co. uviedla na trh robota Omnibot 2000,
- v USA pracovalo približne 20 000 robotov.
Roku 1986
- diaľkovo ovládaný robot Jason JR skúmal vrak Titanicu,
 |
Jason JR skúma vrak Titanicu |
- po havárii v Černobyľskej jadrovej elektrárni boli nasadené sovietske mobilné roboty,
- režisér John Badham nakrútil prvú časť filmu Číslo 5[30] žije o robotovi Johnny 5,
- Kórejčan Nam June Paik vytvoril jednu zo svojich prvých robotických sochárskych kreácií pod názvom Rodina robotov,
- v USA pracovalo už 27 000 robotov,
- v Japonsku bolo 179 výrobcov priemyselných robotov,
- Japonsko tiež v tomto roku sformulovalo grandiózny celonárodný projekt ARD, orientovaný na pokročilé robotizované technológie. Projekt trval do roku 1990 a jeho výsledkom bolo veľké množstvo vysokokvalifikovaných priemyselných robotov s vynikajúcimi technickými vlastnosťami, pričom niektoré z týchto robotov už pracovali na báze umelej inteligencie[31].
Roku 1988
- na výstave Robot' 88 v Brne bol prezentovaný robot ROTES, vyvinutý KAR EF SVŠT a Teslou VRÚSE,
- v nemocnici v Dambury[32] bol aplikovaný robot HelpMate.
 |
 |
HelpMate |
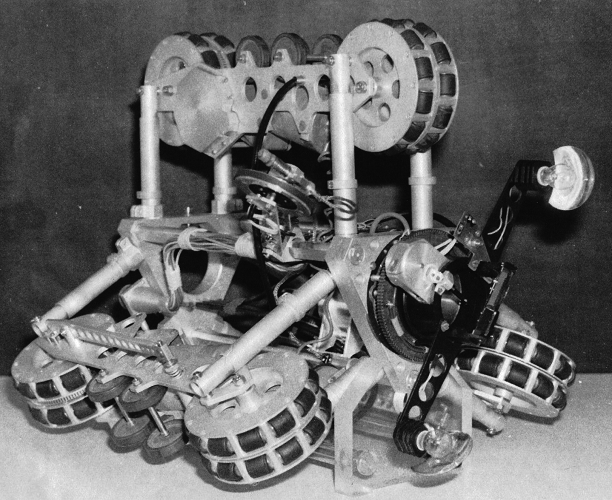
Genghis |
Roku 1989 - Rodney Brooks z MIT Mobile Robots Lab predviedol autonómneho 6-nohého mobilného robota Genghis.
V 70-80tych rokoch - sa v Československu vyrábalo približne dvadsať typov priemyselných robotov a manipulátorov. Na Slovensku v závodoch: ZPA Prešov PR 16-P; ZŤS Detva PR 32 E; VÚKOV Prešov APR2,5, APR20, AM20, AM 80, MPH 1; ZŤS Detva OJ10; TOS Rakovník IRB8; VÚMA Nové mesto nad Váhom AM1D, MX; ZPA Prešov AM5; Vihorlat Snina MTL 10, M 63, UM 160; BAZ Bratislava M 40; SAM Myjava SPR5, SPR10.
Roku 1991 - boli v bojoch v Perzskom zálive nasadené diaľkovo ovládané lietadlá Pioneer.
Roku 1992 - mobilný robot Dante I skúmal sopku Mt. Erebus v Antarktíde.
 |
 |
Dante I |
Dante II |
Roku 1994
- mobilný robot Dante II skúmal dno sopky Mt. Spuur na Aljaške,
- Mark Thorpe zorganizoval v San Franciscu prvý ročník súťaže Robot Wars.
Roku 1995
- sa začala na Slovensku výroba diaľkovo ovládaného odmínovacieho zariadenia Božena,
 |
Božena |
– v rámci výskumného projektu General Motors Foundation vznikla myšlienka kolaboratívneho robota,
- americká firma SARCOS Research Corporation predviedla svojho humanoida DB.
Roku 1996 - David Barettna z MIT skonštruoval robotickú rybu RoboTuna I.
Roku 1997
- na Marse pracoval americký vozík Sokourner,
- odohral šesť šachových partií Gary Kasparov proti počítaču IBM Deep Blue. Podľahol mu pomerom 3,5:2,5,
- sa konal v Japonsku, v meste Nagoya, prvý ročník RoboCupu,
- bol verejnosti predvedený prototyp prvého robotického vysávača Elektrolux Trilobite,
- NASA v rámci letu raketoplánu Columbia STS-87 testovala robotickú inšpekčnú kameru AERCam Sprint.
Roku 1998
- robot Nomand z Carnegie Mellon Univerzity hľadal v Antarktíde meteority,
- izraelská spoločnosť Friendly Robotics uviedla na trh automatickú kosačku Robomov RL500,
- bezpilotné lietadlo Aerosonde Laima úspešne preletelo Atlantickým oceánom,
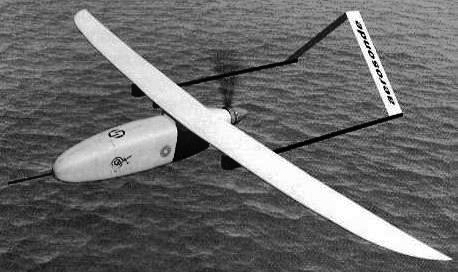 |
Aerosonde Laima |
- firma LEGO uviedla na trh prvú robotickú stavebnicu zo série MINDSTORMS Robotics Invention System,
- Dr. Cynthia Breazeal z MIT skonštruovala interaktívnu robotickú hlavu Kismet.
Roku 1999
- robot Pioneer pracoval v priestoroch štvrtého bloku černobyľskej elektrárne,
- firma GolfPro komerčne inštalovala autonómneho robota InteleCady na prenos golfových palíc v golfovom klube San Jose Country Club,
- spoločnosť Sony predstavila robotického psa AIBO ERS-110.
 |
AIBO |
[9] Roku 1950 vyšla poviedka v zbierke Ja, robot.
[10] Computing Machinery and Inteligence.
[11] Číslicovo riadený.
[12] Cybernetic Spatiodynamic Sculpture.
[13] GM.
[14] Bez hydraulického tlaku.
[15] Neskôr sa nazýval playback.
[16] American Machine & Foundary Corp.
[17] V štáte California.
[18] Ministry of Internacional Trade and Industrie.
[19] Z ktorých časť pracovala po celom svete.
[20] TentacleArm.
[21] Sound Actived Mobile.
[22] Pričom za prvú etapu sa pokladá problematika pary a za druhú problematika elektriny.
[23] Japan Industrial Robot Associattion.
[24] Výskumný ústav strojárenské technologie a ekonomiky.
[25] Výskumný ústav tvářecích strojů a tváření.
[26] V súčasnosti pod týmto označením ide o Robotic Industries Associattion, ktorá združuje výrobcov robotov, ich distributérov, servisné a konzultačné firmy, organizuje kongresy, reprezentuje priemysel robotov vo vláde USA, má výrazný vplyv na vysokoškolské vzdelávanie odborníkov v robotike, pričom v tomto odbore končí približne 25 000 inžinierov ročne. RIA ďalej udeľuje prestížne ceny za objavy a rozvoj robotiky, usporadúva výstavy robotov, vydáva publikácie... Pod jej vedením sa zrodili aj špeciálne normy pre priemyselné roboty a podobne. Veľký vplyv na činnosť tejto inštitúcie mal už spomínaný Joseph Engelberger, ktorý bol dlhé roky prezidentom tejto organizácie.
[27] STS-2.
[28] RRV.
[29] V Californii.
[30] Short Circuit.
[31] Medzi nimi bola aj množina robotických systémov so schopnosťami činnosti na morskom dne, a to aj vo veľkých hĺbkach. Ďalšiu skupinu tvorili inšpekčné roboty, určené na operácie v zamorenom prostredí, prípadne vo veľmi ťažkých klimatických podmienkach.
[32] Connecticut, USA.
Prevzaté a upravené z:
• https://www.avir.sk/download/rob01.pdf.
Hodnotenie užitočnosti článku:





![]()
· Simulácie z fyziky· O Slovensku po slovensky· Slovenské kroje· Kurz národopisu· Diela maliarov· Kontrolné otázky, Domáce úlohy, E-testy - Priemysel· Odborné obrázkové slovníky· Poradňa žiadaného učiteľa· Rýchlokurz Angličtiny. Rozprávky (v mp3)· PREHĽADY (PRIBUDLO, ČO JE NOVÉ?)Seriály:· História sveta (1÷6)· História Slovenska (1÷5)· História módy (1÷5).
Členstvo na portáli
Poznámka pre autora
Copyright © 2013-2026 Wesline, s.r.o. Všetky práva vyhradené. Mapa stránky ako tabuľka | Kurzy | Prehľady |

